Our team applies deep expertise in motor control, embedded systems, and autonomous navigation to rethink drone architecture from first principles.
Open-source flight control software has reached a high level of maturity. Solutions such as BetaFlight, iNAV, ArduPilot, and PX4 serve the community well. Yet critical questions remain:
Platform Flexibility — Can flight controllers be more adaptable across diverse deployment scenarios?
Architectural Innovation — What alternative design paradigms lie between lightweight controllers like BetaFlight and full-featured systems like PX4?
Converged Architecture — Can we leverage the mature Raspberry Pi ecosystem to unify low-level PID control with high-level processing—computer vision, autonomous mission planning, and real-time decision-making—on a single, cohesive platform?
We are building toward that convergence.
Technology Stack
Low-Level Processing
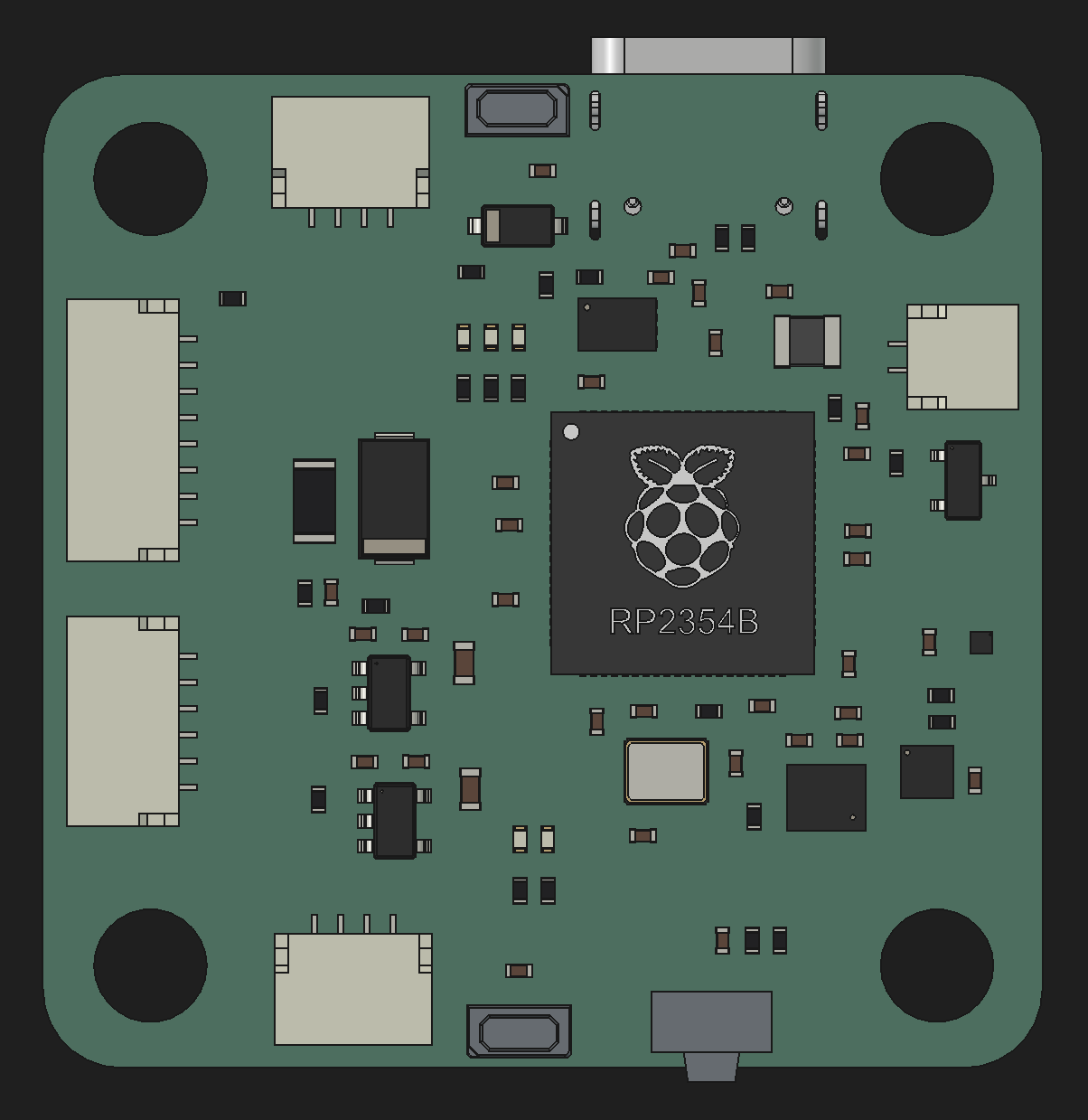
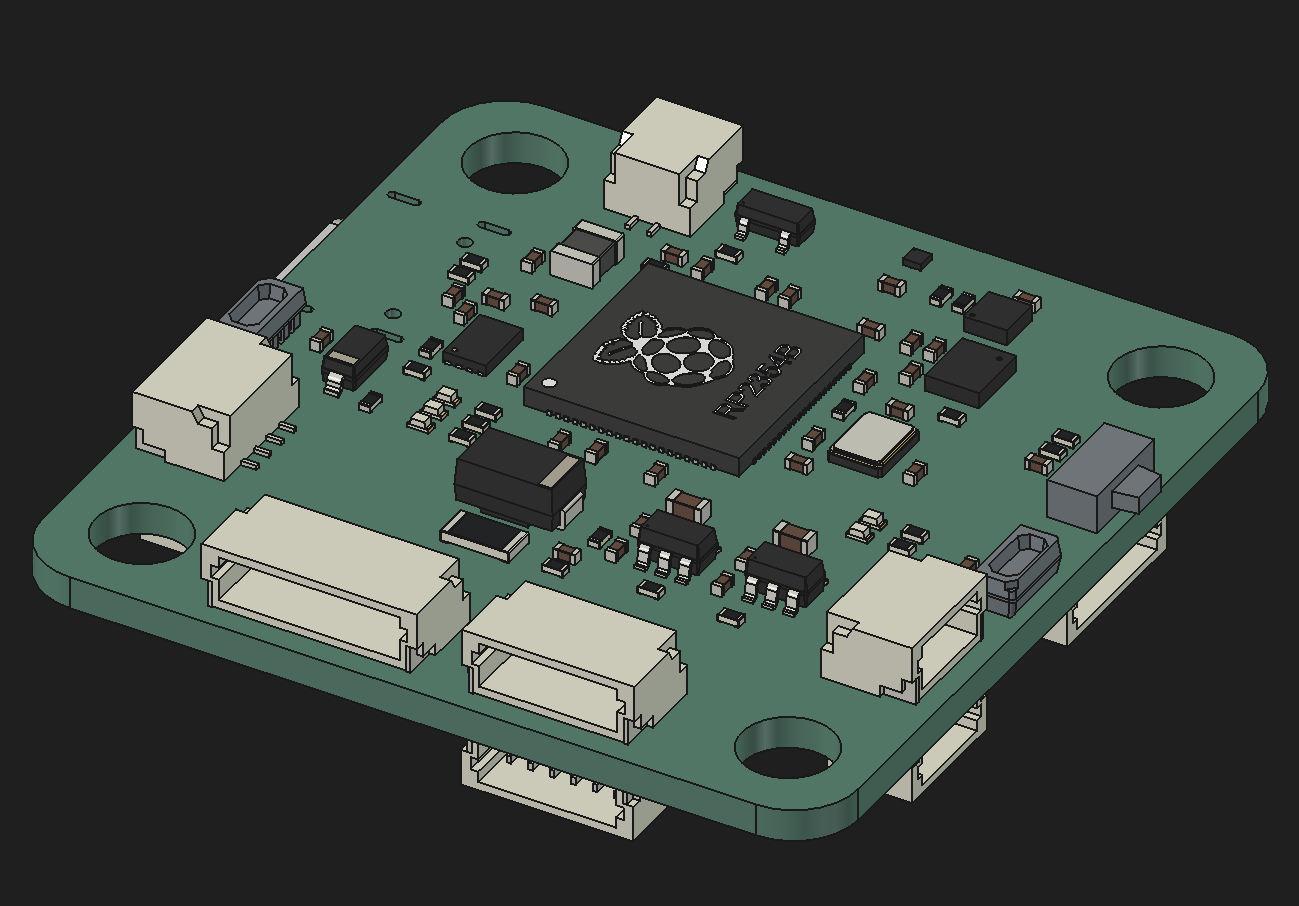
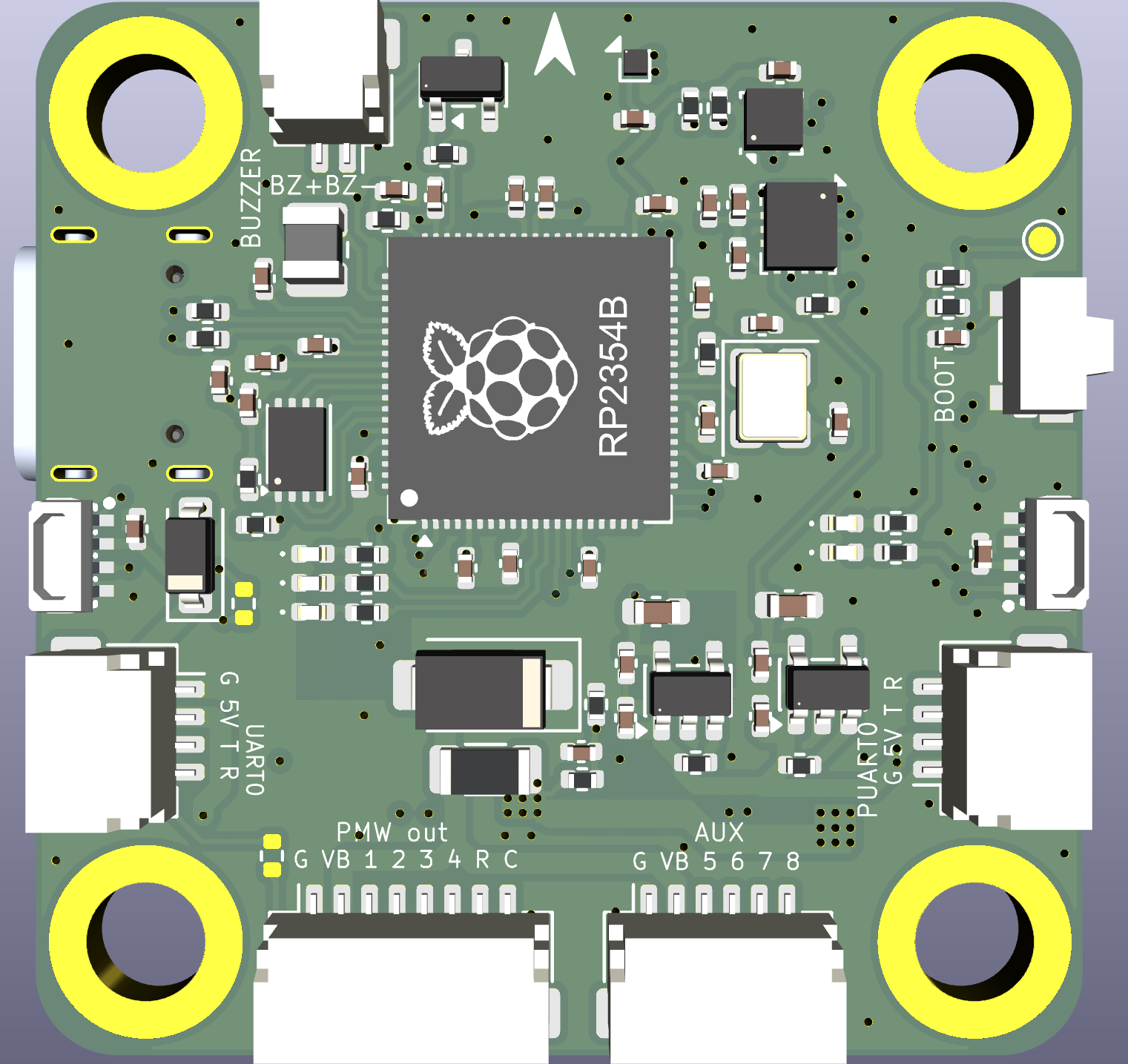
RP2350 — Dual-core MCU for PID loops, motor control, and IMU feedback
Modular design — Add more RP2350 chips as I/O requirements grow
High-Level Processing
Raspberry Pi — From Zero 2 W to Pi 5 (CM5)
Vision processing, mission planning, ground station communication, and autonomous contingency handling
Software Foundation
Rebuilt from first principles: PID loops, motor control, IMU feedback