目錄
願景
我們的團隊運用在電機控制、嵌入式系統與自主導航方面的深厚專業,從第一性原理重新思考無人機架構。
開源飛控軟體已發展至高度成熟的階段。BetaFlight、iNAV、ArduPilot 與 PX4 等方案很好地服務了社群。然而,仍有一些關鍵問題有待回答:
- 平台靈活性 — 飛控能否在更多元的部署場景中更具適應性?
- 架構創新 — 在輕量級控制器(如 BetaFlight)與功能完整的系統(如 PX4)之間,是否存在替代的設計範式?
- 融合架構 — 我們能否利用成熟的 Raspberry Pi 生態系,將底層 PID 控制與高層處理——電腦視覺、自主任務規劃與即時決策——整合至單一一致的平台上?
我們正朝著這個融合目標前進。
技術棧
底層處理
- RP2350 — 雙核心 MCU,用於 PID 迴路、電機控制與 IMU 回饋
- 模組化設計 — 當 I/O 需求增長時,可增加更多 RP2350 晶片
高層處理
- Raspberry Pi — 從 Zero 2 W 到 Pi 5(CM5)
- 視覺處理、任務規劃、地面站通訊與自主應變處理
軟體基礎
- 從第一性原理重新建構:PID 迴路、電機控制、IMU 回饋
- 高層感測器融合:光流、GPS、LiDAR
- MAVLink Proxy,用於整合地面站與任務規劃工具
產品
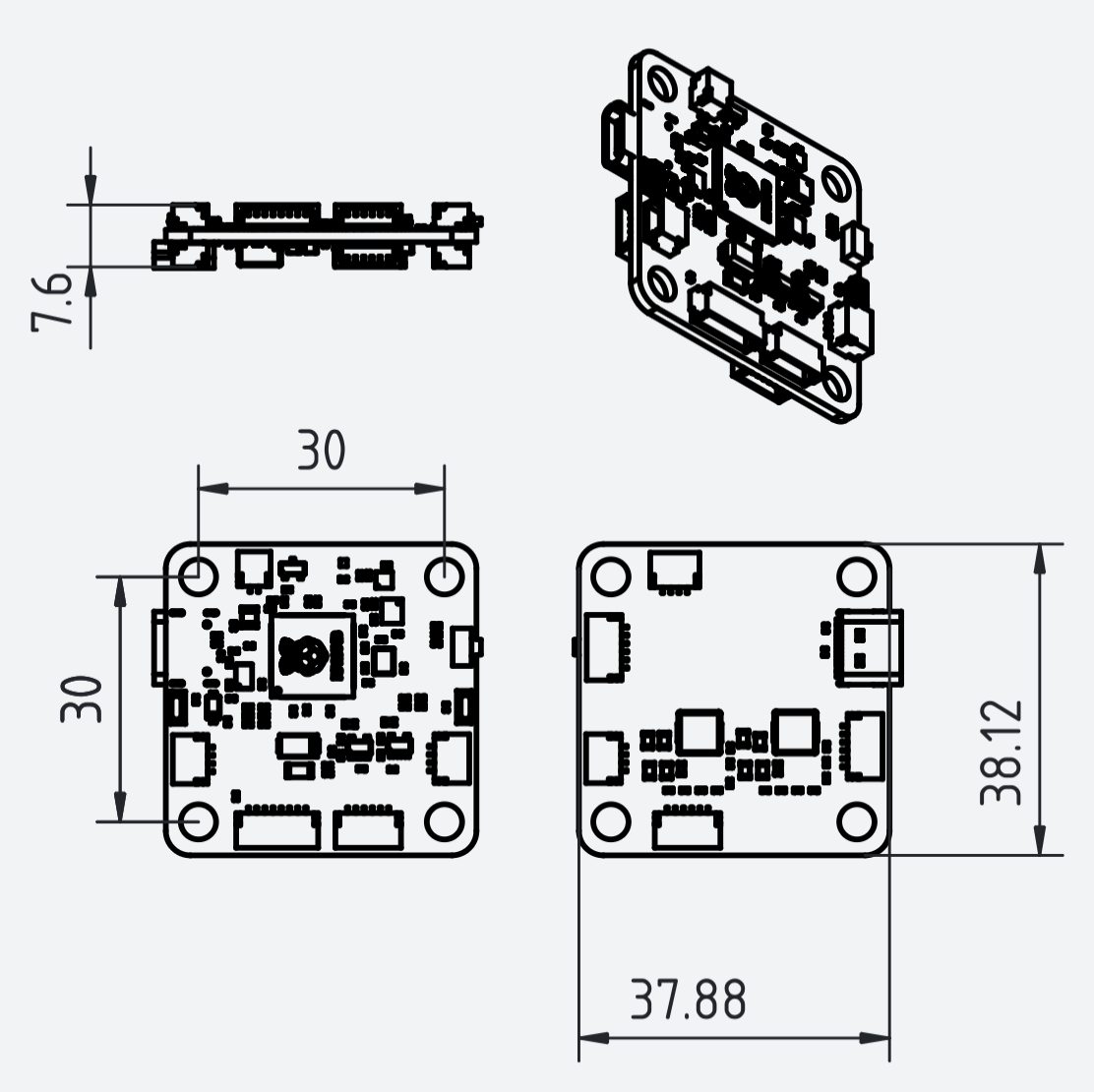
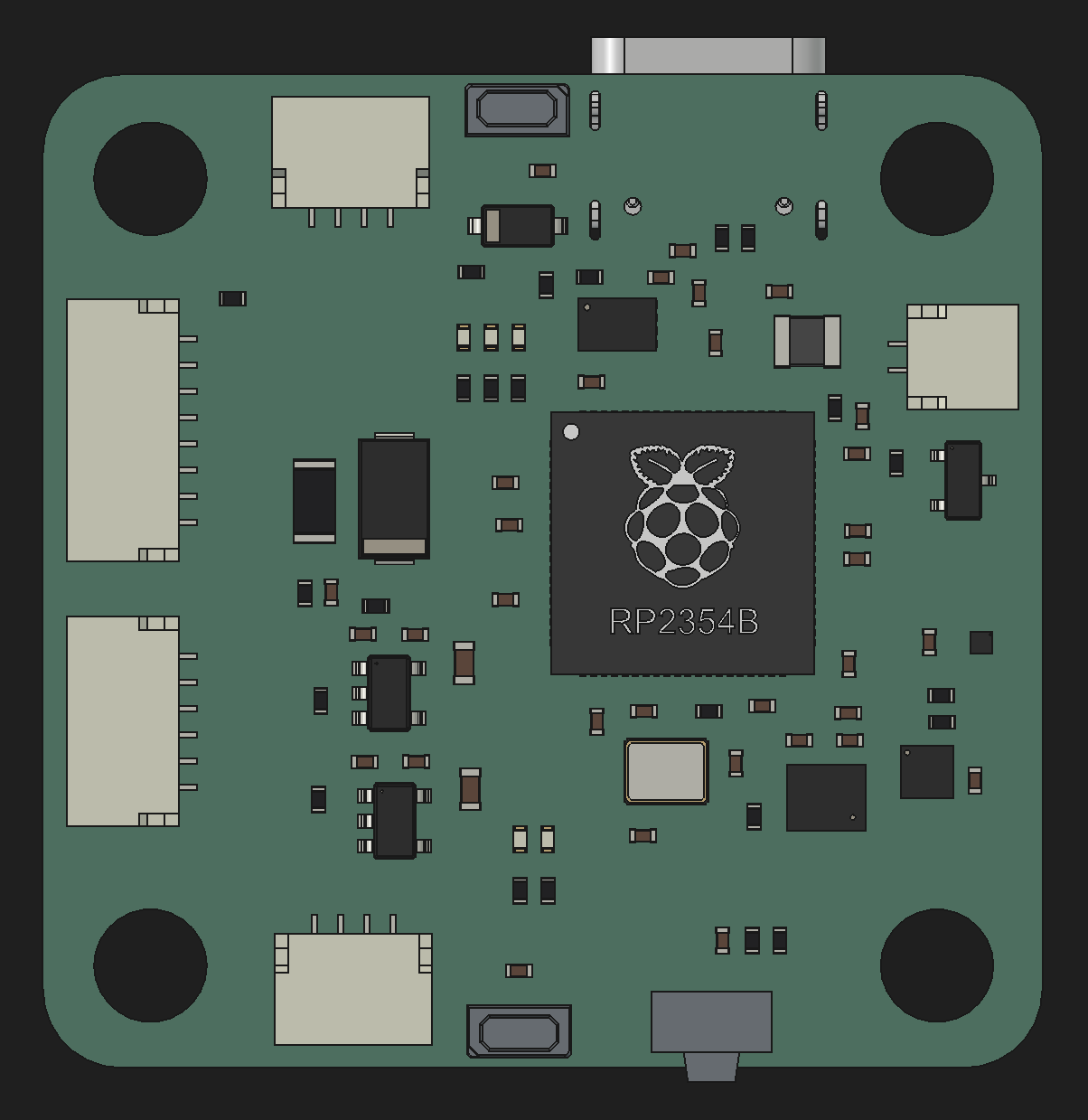
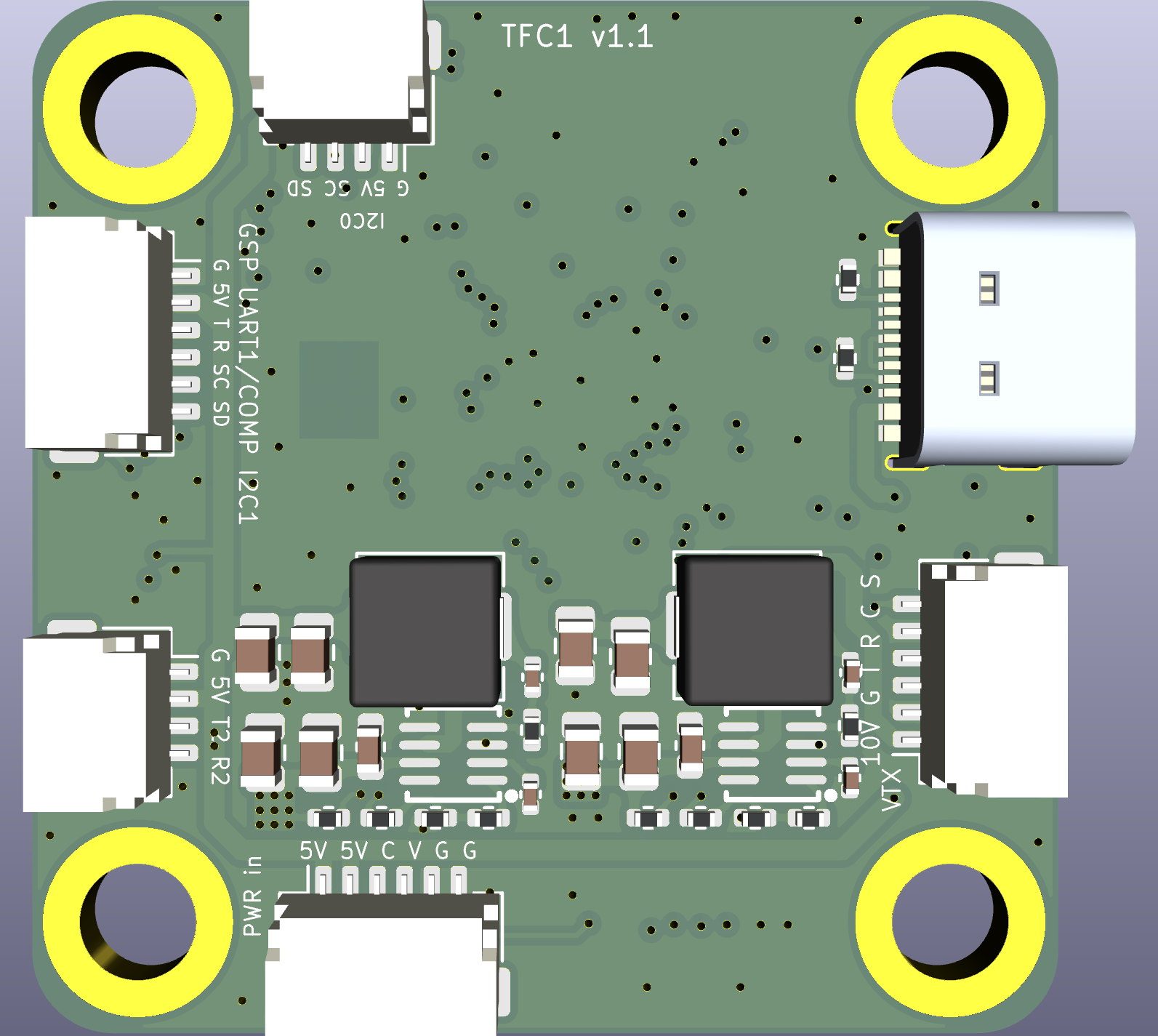
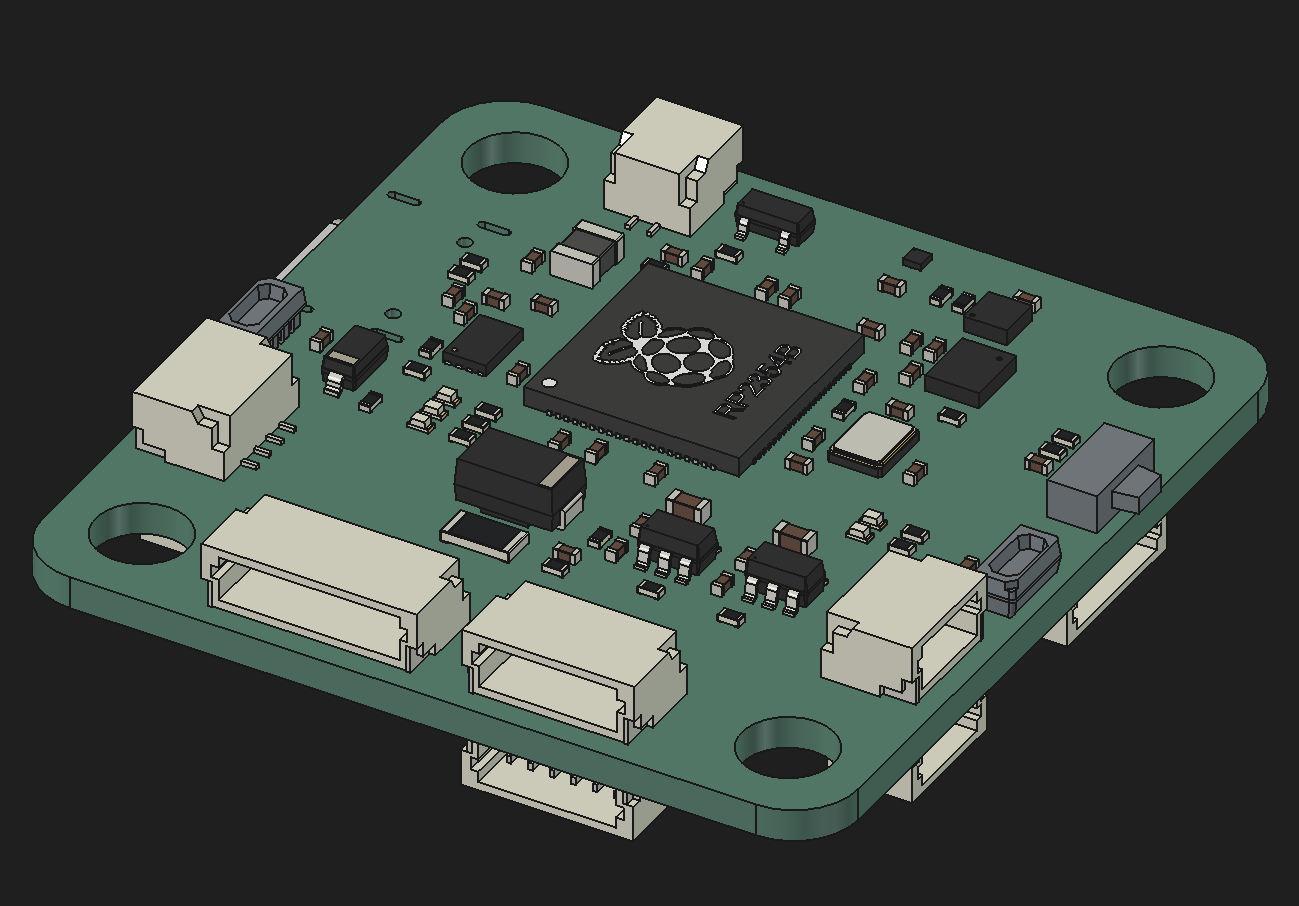
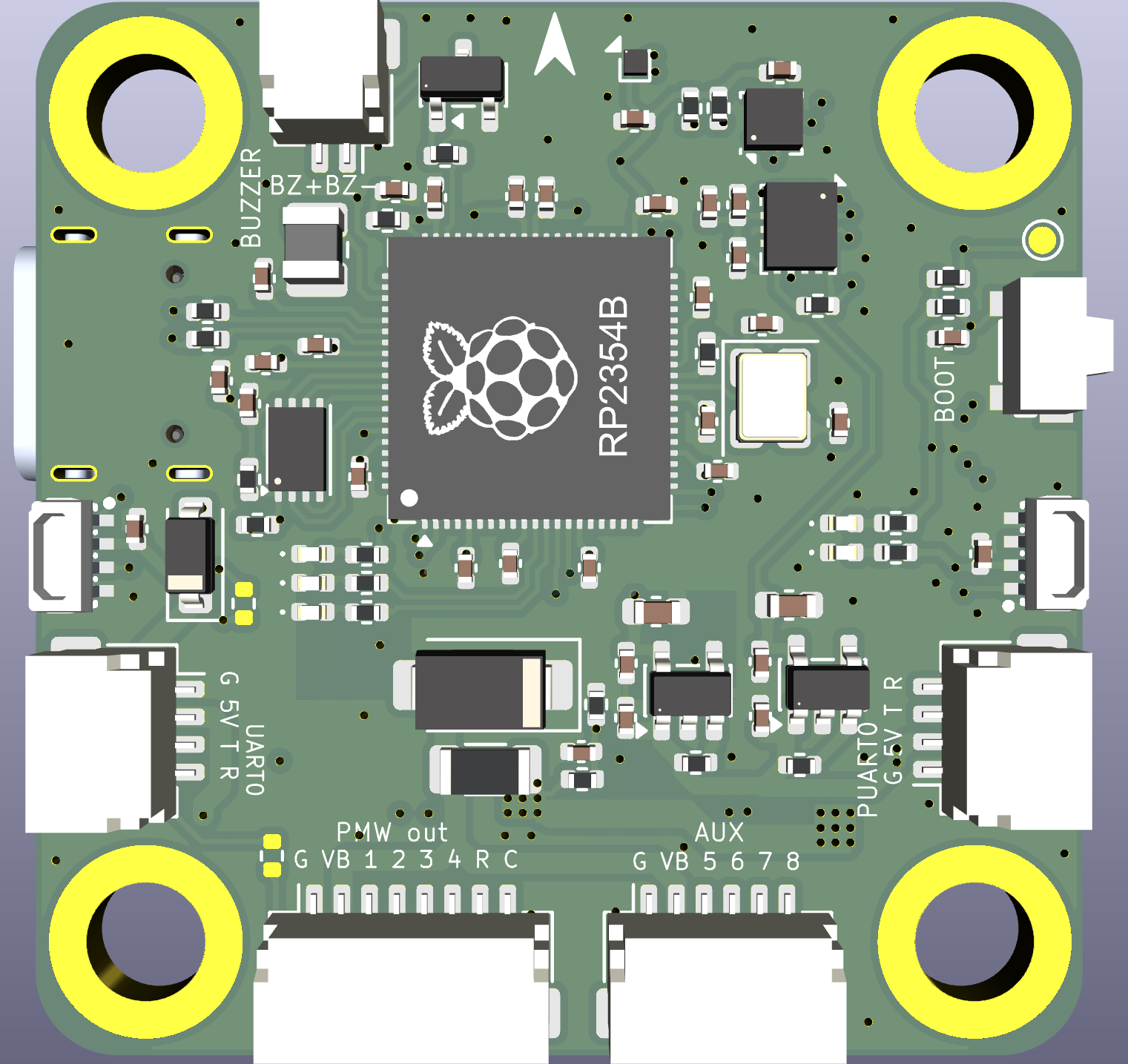
TFC1 — 飛控系統
現已上市
TFC1 是我們的主力飛控系統,基於 RP2350B MCU(Pi Pico 2)打造,為底層無人機處理提供堅實的基礎。
主要功能
- RP2350B MCU — 雙核心處理器,用於靈活配置底層演算法
- 可擴展 I/O — 可新增多個 RP2350 晶片以擴展 I/O
- 即時控制 — PID 迴路、電機控制與 IMU 回饋
- 開放架構 — 專為跨平台可行性探索而設計
參考套件
室內開發與測試用:
- 3 吋螺旋槳與護罩
- 8000 KV BLDC 電機
- 15A 4合1 ESC
- Pi Zero 2 W 搭配 Pi Cam(OpenCV)
- 光流感測器模組
- 2–3S LiPo 電池
- BEC:5V × 5A(PB5A)供電給 Raspberry Pi
- ELRS 2.4 GHz
- 遙測與 Vision 無線網路

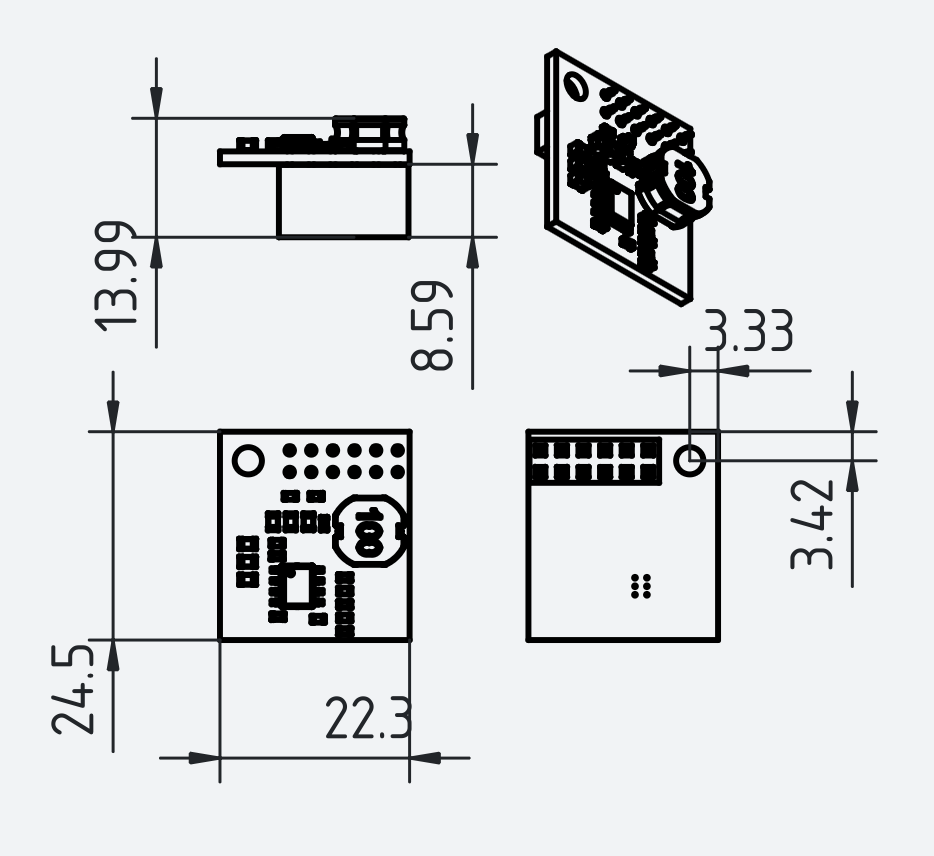
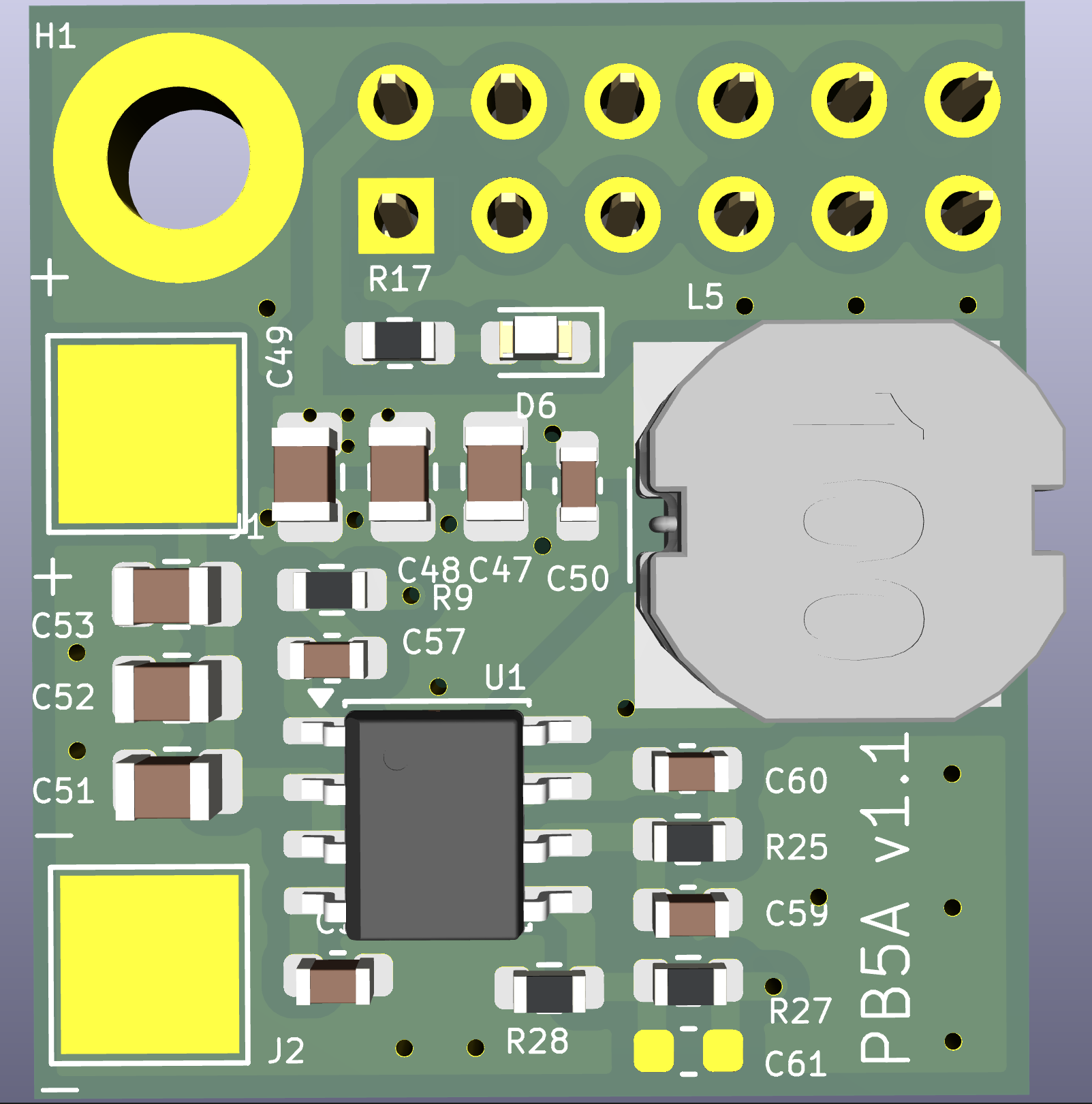
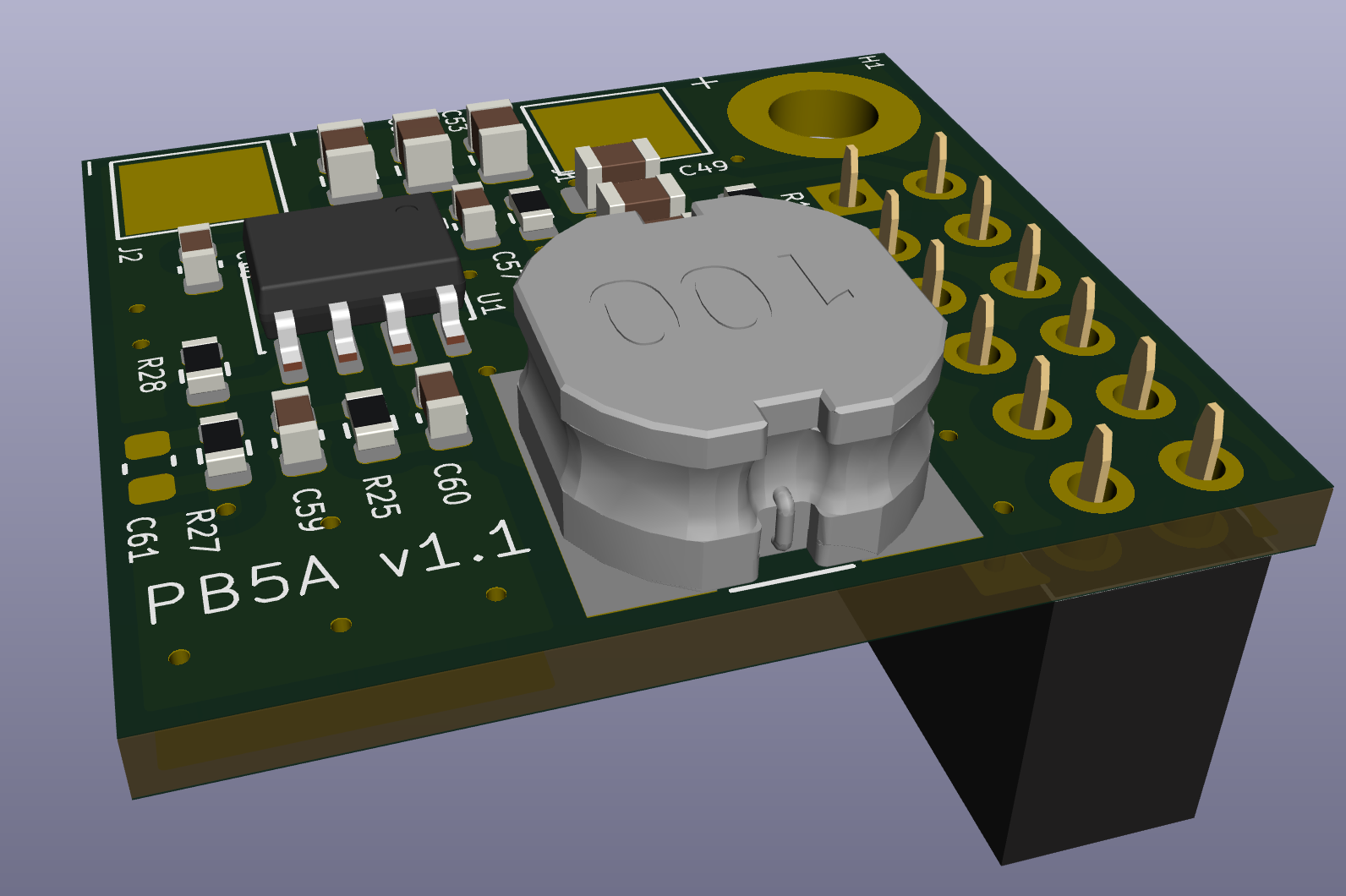
PB5A — 電源模組(BEC)
現已上市
PB5A 是一款 5V / 5A BEC 模組,專為無人機應用中的 Raspberry Pi 供電而設計。
主要功能
- 5V / 5A 輸出 — 穩定供電給 Raspberry Pi
- 無人機最佳化 — 專為空中應用設計
- 緊湊外型 — 易於整合至無人機建置
產品路線圖
- 2026年5月
- RPi 5 視覺 — OpenCV 中的光流與 VIO 範例,用於室內參考套件(3吋框架)
- MAVLink Proxy — 整合地面站的參考方案
- 2026年6月:
- 室外參考套件展示 [待確定]